パスを計算するサービス。
| キーポイント | 詳細 |
|---|---|
| PathfindingService | パスを計算するサービス。 |
| Path | 計算されたパスを表すオブジェクト。 |
| Waypoints | キャラクターが従うべきパスに沿ったポイント。 |
| Agent Parameters | キャラクターの移動能力と制限を定義するパラメータ(例:半径、高さ、ジャンプ高さ)。 |
| Blocked Event | パスがブロックされたときに発生するイベント。 |
| StatusChanged Event | パスのステータスが変更されたときに発生するイベント。 |
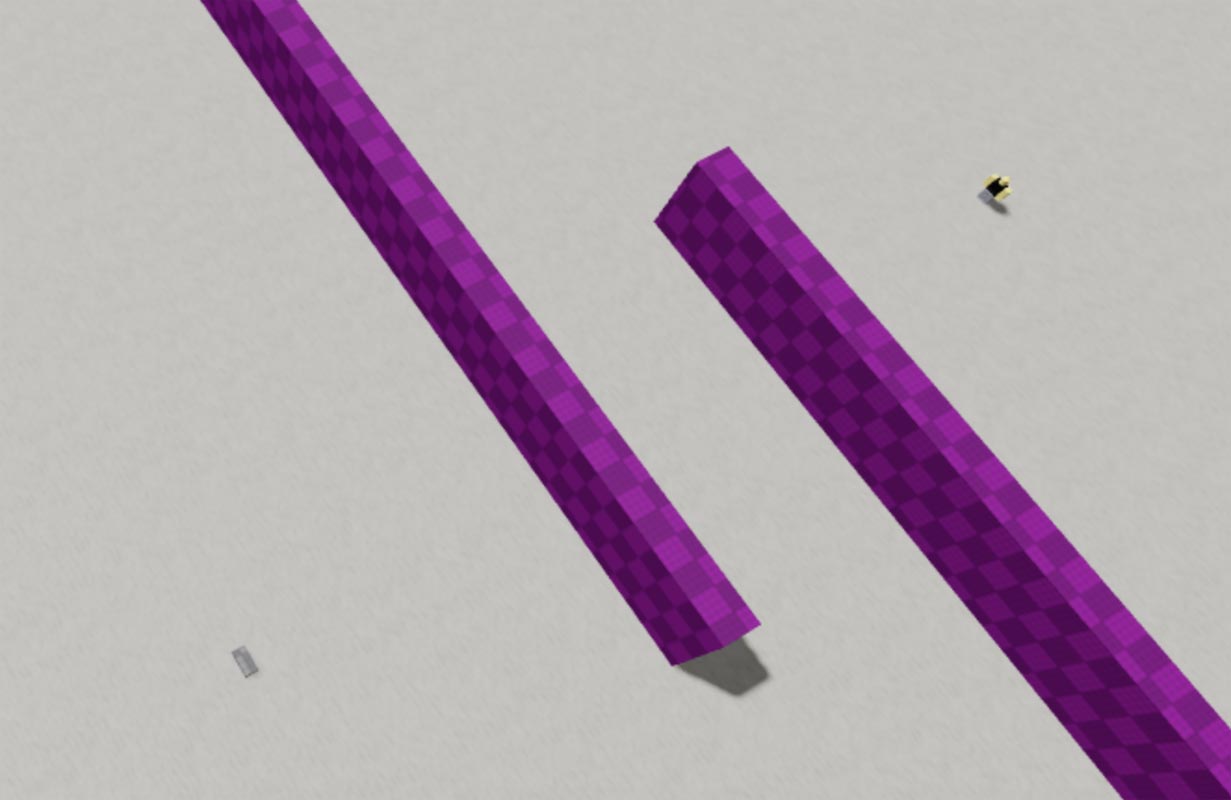
開始点と終了点を定義する
Roblox Studio
local PathfindingService = game:GetService("PathfindingService")
local character = workspace:WaitForChild("NPC")
local humanoid = character:WaitForChild("Humanoid")
local humanoidRootPart = character:WaitForChild("HumanoidRootPart")
humanoidRootPart.Anchored = false
-- Get the NPC's start position
local startPoint
if character.PrimaryPart then
startPoint = character.PrimaryPart.Position
elseif character:FindFirstChild("HumanoidRootPart") then
startPoint = character.HumanoidRootPart.Position
else
error("No valid part found to determine the NPC's position")
end
local endPoint = workspace.End.Positionパスの作成
-- Create a path object
local path = PathfindingService:CreatePath({
AgentRadius = 2,
AgentHeight = 5,
AgentCanJump = true,
AgentJumpHeight = 10,
AgentMaxSlope = 45,
})パスの計算
-- Compute the path
path:ComputeAsync(startPoint, endPoint)
-- Check the path's status
if path.Status == Enum.PathStatus.Success then
print("Path successfully computed.")
elseif path.Status == Enum.PathStatus.NoPath then
print("No path could be found.")
elseif path.Status == Enum.PathStatus.Fail then
print("Path computation failed.")
endパスの視覚化
-- Visualize the path
local waypoints = path:GetWaypoints()
for _, waypoint in ipairs(waypoints) do
local part = Instance.new("Part")
part.Shape = Enum.PartType.Ball
part.Material = Enum.Material.Neon
part.Color = Color3.fromRGB(0, 255, 0)
part.Size = Vector3.new(0.5, 0.5, 0.5)
part.Position = waypoint.Position
part.Anchored = true
part.CanCollide = false
part.Parent = workspace
end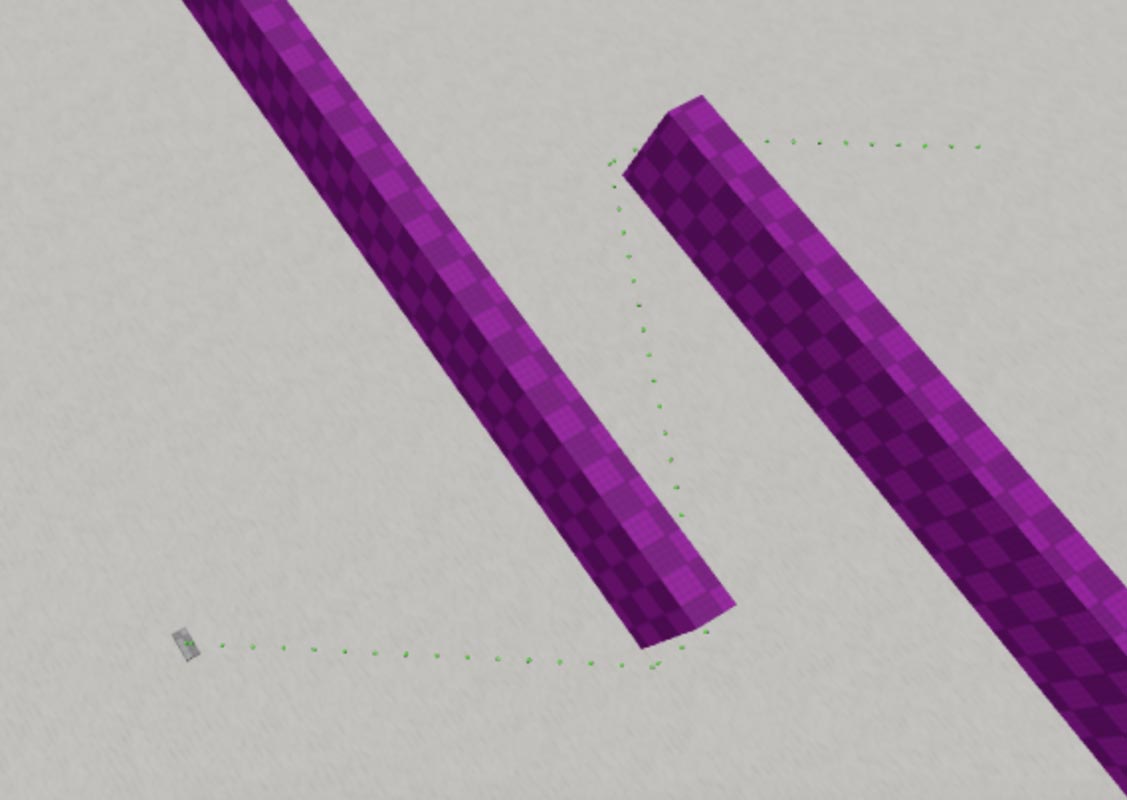
Roblox Studio
NPCをパスに沿って移動させる
-- Move the character along the path
for _, waypoint in ipairs(waypoints) do
print(waypoint.Position)
print(humanoid)
humanoid:MoveTo(waypoint.Position)
humanoid.MoveToFinished:Wait()
end
print("Character has followed the path.")
Roblox Studio
例:完全なコード
local PathfindingService = game:GetService("PathfindingService")
local character = workspace:WaitForChild("NPC")
local humanoid = character:WaitForChild("Humanoid")
local humanoidRootPart = character:WaitForChild("HumanoidRootPart")
humanoidRootPart.Anchored = false
-- Get the NPC's start position
local startPoint
if character.PrimaryPart then
startPoint = character.PrimaryPart.Position
elseif character:FindFirstChild("HumanoidRootPart") then
startPoint = character.HumanoidRootPart.Position
else
error("No valid part found to determine the NPC's position")
end
local endPoint = workspace.End.Position
-- Create a path object
local path = PathfindingService:CreatePath({
AgentRadius = 2,
AgentHeight = 5,
AgentCanJump = true,
AgentJumpHeight = 10,
AgentMaxSlope = 45,
})
-- Compute the path
path:ComputeAsync(startPoint, endPoint)
-- Check the path's status
if path.Status == Enum.PathStatus.Success then
print("Path successfully computed.")
elseif path.Status == Enum.PathStatus.NoPath then
print("No path could be found.")
elseif path.Status == Enum.PathStatus.Fail then
print("Path computation failed.")
end
-- Handle path being blocked during movement
path.Blocked:Connect(function(blockedWaypointIndex)
print("Path is blocked at waypoint index:", blockedWaypointIndex)
end)
-- Visualize the path
local waypoints = path:GetWaypoints()
for _, waypoint in ipairs(waypoints) do
local part = Instance.new("Part")
part.Shape = Enum.PartType.Ball
part.Material = Enum.Material.Neon
part.Color = Color3.fromRGB(0, 255, 0)
part.Size = Vector3.new(0.5, 0.5, 0.5)
part.Position = waypoint.Position
part.Anchored = true
part.CanCollide = false
part.Parent = workspace
end
-- Move the character along the path
for _, waypoint in ipairs(waypoints) do
print(waypoint.Position)
print(humanoid)
humanoid:MoveTo(waypoint.Position)
humanoid.MoveToFinished:Wait()
end
print("Character has followed the path.")